ubuntu18.04 + ROS Melodic + usb摄像头 + 相机标定 |
您所在的位置:网站首页 › ros usb camera › ubuntu18.04 + ROS Melodic + usb摄像头 + 相机标定 |
ubuntu18.04 + ROS Melodic + usb摄像头 + 相机标定
|
文章目录
前言一、usb_cam安装1.下载usb_cam包2.usb_cam文件夹下编译
二、启动ros下usb摄像头三、usb_camera启动失败出现的问题1、修改usb3.0接入虚拟机2、虚拟机内连接摄像头
四、ros实现相机标定1、检查文件2、进行标定3、采集样本数据
前言
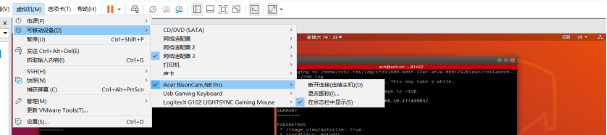
文章基于ubuntu18.04下的ros Melodic,关于ubuntu安装以及ros安装不再赘述,主要是ROS下的usb_cam程序包安装,以及出现的问题,最后是使用ros进行标相机标定。 一、usb_cam安装 1.下载usb_cam包进入catkin_ws在src文件夹下,下载usb_cam包。gitclone失败就多试几次。 git clone https://github.com/bosch-ros-pkg/usb_cam.git usb_cam成功后如下图: 建立一个名为build的文件夹,cd进入后执行编译命令如下: cmake .. make成功后如下图: (1)新开一个终端,执行roscore: roscore(2)再新开一个终端到工作空间根目录catkin_ws文件夹下执行catkin_make命令: catkin_make(3)在当前终端下,在根目录(catkin_ws)设置环境变量: source devel/setup.bash(4)在根目录下当前终端执行下执行,启动摄像头: roslaunch usb_cam usb_cam-test.launch成功如下图,且摄像头画面出现: ERROR: cannot launch node of type [image_view/image_view]: image Cannot identify ‘/dev/video0’: 2, No such file or directory 1、修改usb3.0接入虚拟机
一般来说正常安装ros都是包含了camera_calibration,输入下面命令检查一下: rosdep install camera_calibration #出现All required rosdeps installed successfully表示已包含 2、进行标定 rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.0245 image:=/usb_cam/image_raw camera:=/usb_cam执行成功会出现下图: 为了得到一个好的标定结果,应该使得标定板尽量出现在摄像头视野的各个位置里:标定板出现在视野中的左边,右边,上边和下边,标定板既有倾斜的,也有水平的,离得近的远的都要有,最好保证所有的进度条都是绿色满格的 。 界面中的: x:表示标定板在视野中的左右位置。 y:表示标定板在视野中的上下位置。 size:标定板在占视野的尺寸大小,也可以理解为标定板离摄像头的远近。 skew:标定板在视野上下左右中的倾斜位置。 |





【本文地址】